Fish-eye camera#
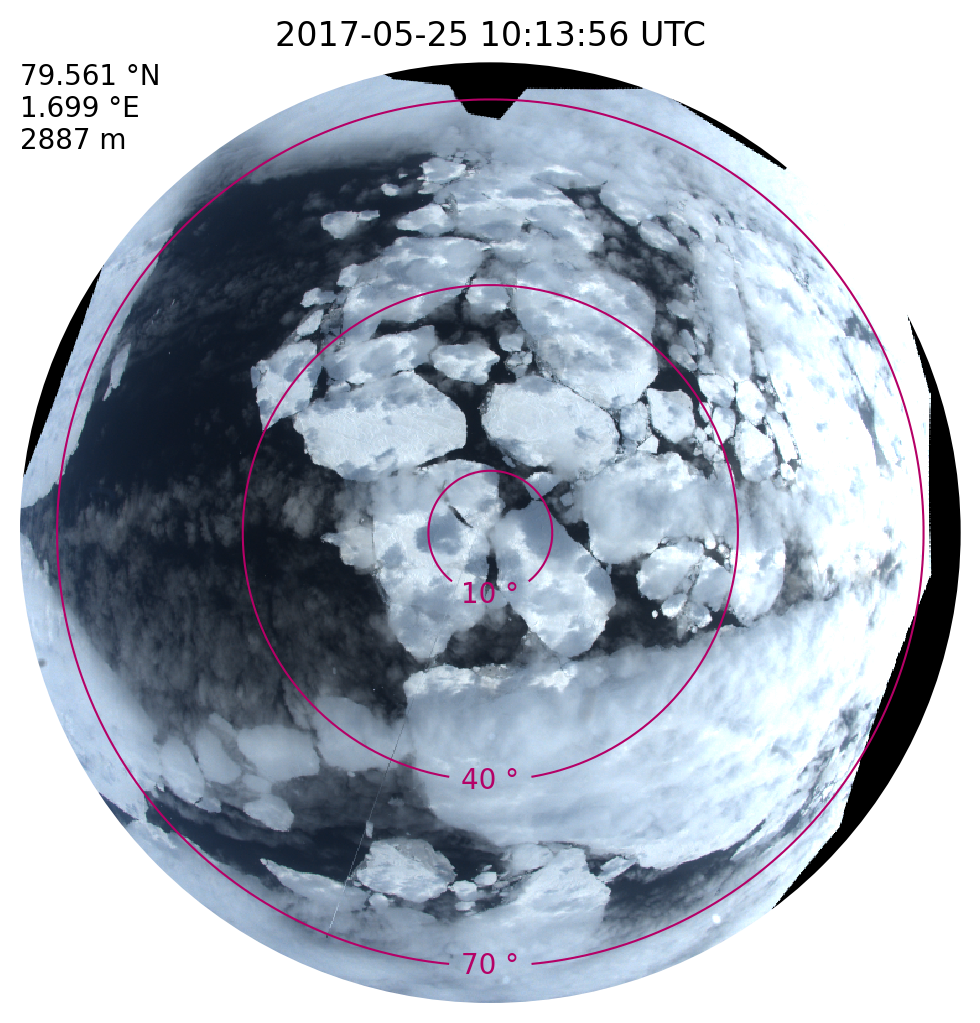
A downward-looking commercial digital camera equipped with a 180°-fisheye lens was installed on the aircraft Polar 5. Images of the Arctic surface and clouds were taken every 4-6 seconds. The data set provides rectified fields of calibrated radiances along the flight track for the three spectral bands (red, green, and blue). The full dataset is available on PANGAEA for ACLOUD, AFLUX and MOSAiC-ACA. In the next sections, the data is loaded from the PANGAEA database and a cloudy scene over sea ice is plotted.
Data access#
To analyse the data they first have to be loaded by importing the (AC)³airborne meta data catalogue. To do so the ac3airborne package has to be installed. More information on how to do that and about the catalog can be found here.
import os
from dotenv import load_dotenv
load_dotenv()
# local caching
kwds = {'simplecache': dict(
cache_storage=os.environ['INTAKE_CACHE'],
same_names=True
)}
Get data#
import ac3airborne
cat = ac3airborne.get_intake_catalog()
datasets = []
for campaign in ['ACLOUD', 'AFLUX', 'MOSAiC-ACA','HALO-AC3']:
datasets.extend(list(cat[campaign]['P5']['FISH_EYE_CAMERA']))
datasets
['ACLOUD_P5_RF05',
'ACLOUD_P5_RF06',
'ACLOUD_P5_RF07',
'ACLOUD_P5_RF08',
'ACLOUD_P5_RF10',
'ACLOUD_P5_RF11',
'ACLOUD_P5_RF13',
'ACLOUD_P5_RF14',
'ACLOUD_P5_RF15',
'ACLOUD_P5_RF16',
'ACLOUD_P5_RF17',
'ACLOUD_P5_RF18',
'ACLOUD_P5_RF19',
'ACLOUD_P5_RF20',
'ACLOUD_P5_RF21',
'ACLOUD_P5_RF22',
'ACLOUD_P5_RF23',
'ACLOUD_P5_RF25',
'AFLUX_P5_RF03',
'AFLUX_P5_RF04',
'AFLUX_P5_RF05',
'AFLUX_P5_RF06',
'AFLUX_P5_RF07',
'AFLUX_P5_RF08',
'AFLUX_P5_RF09',
'AFLUX_P5_RF10',
'AFLUX_P5_RF11',
'AFLUX_P5_RF12',
'AFLUX_P5_RF13',
'AFLUX_P5_RF14',
'AFLUX_P5_RF15',
'MOSAiC-ACA_P5_RF04',
'MOSAiC-ACA_P5_RF05',
'MOSAiC-ACA_P5_RF06',
'MOSAiC-ACA_P5_RF07',
'MOSAiC-ACA_P5_RF08',
'MOSAiC-ACA_P5_RF09',
'MOSAiC-ACA_P5_RF10',
'MOSAiC-ACA_P5_RF11',
'HALO-AC3_P5_RF01',
'HALO-AC3_P5_RF03',
'HALO-AC3_P5_RF04',
'HALO-AC3_P5_RF05',
'HALO-AC3_P5_RF06',
'HALO-AC3_P5_RF07',
'HALO-AC3_P5_RF08',
'HALO-AC3_P5_RF09',
'HALO-AC3_P5_RF10',
'HALO-AC3_P5_RF11',
'HALO-AC3_P5_RF12',
'HALO-AC3_P5_RF13']
Note
Have a look at the attributes of the xarray dataset ds_cam for all relevant information on the dataset, such as author, contact, or citation information.
ds_cam = cat['ACLOUD']['P5']['FISH_EYE_CAMERA']['ACLOUD_P5_RF05'](storage_options=kwds,hour='10').to_dask()
ds_cam
/net/sever/mech/miniconda3/envs/howtoac3/lib/python3.11/site-packages/intake_xarray/base.py:21: FutureWarning: The return type of `Dataset.dims` will be changed to return a set of dimension names in future, in order to be more consistent with `DataArray.dims`. To access a mapping from dimension names to lengths, please use `Dataset.sizes`.
'dims': dict(self._ds.dims),
<xarray.Dataset> Size: 2GB
Dimensions: (dim_y: 901, dim_x: 901, dim_t: 506)
Dimensions without coordinates: dim_y, dim_x, dim_t
Data variables:
vza (dim_y, dim_x) int32 3MB ...
vaa (dim_y, dim_x) int32 3MB ...
radiance_red (dim_t, dim_y, dim_x) int16 822MB ...
radiance_green (dim_t, dim_y, dim_x) int16 822MB ...
radiance_blue (dim_t, dim_y, dim_x) int16 822MB ...
time (dim_t) float32 2kB ...
altitude (dim_t) int16 1kB ...
longitude (dim_t) float32 2kB ...
latitude (dim_t) float32 2kB ...
Attributes:
Institution: Leipzig Institute for Meteorology (LIM) - University of Lei...
Comment: Date 2017-05-25The dataset includes the red, green and blue radiances (radiance_red, radiance_green, radiance_blue), the camera’s zenith and azimuth angles (vza, vaa), and information on the aircraft’s flight altitude (altitude) and position (latitude, longitude).
Next, the time is converted from dec UTC to datetime:
import datetime
import numpy as np
def convert_time(ds):
"""
Convert time
"""
date = datetime.datetime.strptime(ds.attrs['Comment'], 'Date %Y-%m-%d')
time = np.array([(date + datetime.timedelta(hours=h)).replace(microsecond=0) for h in ds.time.values.astype('float')])
ds['time'] = (('dim_t'), time)
return ds
print(ds_cam.time.dtype)
ds_cam = convert_time(ds_cam)
print(ds_cam.time.dtype)
float32
datetime64[ns]
Plots#
%matplotlib inline
import matplotlib.pyplot as plt
from matplotlib import patches
plt.style.use("../../mplstyle/book")
def scaling(x, a, b, x_min=None, x_max=None):
"""
Scale values x in new range from a to b
"""
if x_min is None:
x_min = np.min(x)
if x_max is None:
x_max = np.max(x)
x_scaled = a + (x-x_min) * (b-a) / (x_max-x_min)
return x_scaled
# select timestep
t = 117
fig, ax = plt.subplots(1, 1, figsize=(5, 5), constrained_layout=True)
# 1: convert radiances to RGB image
rgb = np.stack([ds_cam[c].sel(dim_t=t) for c in ['radiance_red', 'radiance_green', 'radiance_blue']])
# scale radiances between 0 and 255, with 255 = 95th percentile of RGB radiances
max_radiance = np.percentile(rgb, 95)
rgb = scaling(x=rgb.astype('float64'),
a=0,
b=255,
x_min=0,
x_max=max_radiance)
rgb = np.round(rgb, 0).astype('int')
rgb = rgb.transpose(1, 2, 0)
# set values that exceed the 95 percentile
rgb[rgb > 255] = 255
im = ax.imshow(rgb, interpolation='nearest')
# zoom into center of image
center = 450
radius = 380
patch = patches.Circle((center, center), radius=radius, fc='none')
ax.add_patch(patch)
im.set_clip_path(patch)
# set axis limits: image origin is upper left corner
ax.set_xlim(center-radius, center+radius)
ax.set_ylim(center+radius, center-radius)
# 2: show viewing angle grid
ct_vza = ax.contour(ds_cam.dim_x, ds_cam.dim_y, ds_cam.vza*1e-2, levels=np.array([10, 40, 70]), colors='#B50066', linestyles='-', linewidths=0.75)
ax.clabel(ct_vza, fmt='%1.0f °', manual=[(center, 490), (center, 640), (center, 800)])
# 3: add meta information
alt = ds_cam.altitude.sel(dim_t=t).values.item()
time = datetime.datetime.fromtimestamp((ds_cam.time.sel(dim_t=t).values - np.datetime64('1970-01-01 00:00:00')) / np.timedelta64(1, 's'), datetime.timezone.utc)
lon = ds_cam.longitude.sel(dim_t=t).values.item()
lat = ds_cam.latitude.sel(dim_t=t).values.item()
txt = '{} °N\n{} °E\n{} m'.format(np.round(lat, 3), np.round(lon, 3), int(np.round(alt, 0)))
ax.annotate(txt, xy=(center-radius, center-radius), xycoords='data', ha='left', va='top')
time_txt = time.strftime('%Y-%m-%d %H:%M:%S UTC')
ax.set_title(time_txt)
ax.axis('off')
plt.show()